CubeMars赋能MIT Mini Cheetah:让四足机器人跃向新高度
2018.06.25
在很多四足机器人发展的叙事里,MIT Mini Cheetah几乎已经成为一个象征性的起点。它不仅仅是一台机器人,更像是一个时代的缩影:从实验室走向真实世界,从概念验证走向动态能力的极限探索。
在这段故事的早期,有一个关键的参与者——CubeMars。
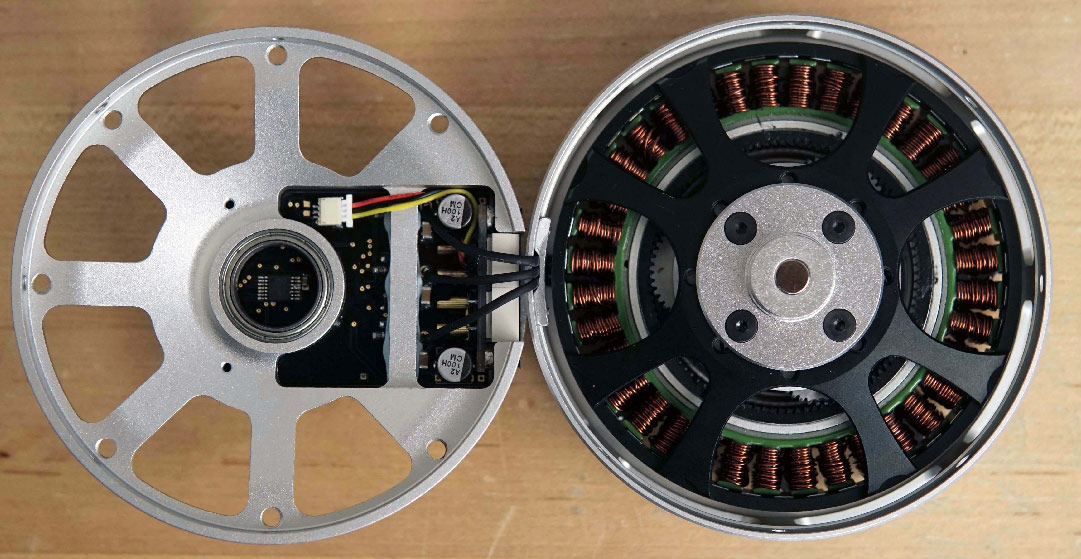
CubeMars在这一阶段参与了Mini Cheetah相关的执行器系统开发工作,并提供了高性能的关节驱动方案,其中早期的U8系列电机在高扭矩密度与动态响应方面起到了关键支撑作用。
Mini Cheetah的一项里程碑是它完成了四足机器人历史上第一次360度后空翻。在当时,这一动作几乎被认为是不可能实现的:四足结构缺乏人类或双足机器人那种连续翻转的运动路径,而落地冲击又极其剧烈。
但Mini Cheetah做到了。这一动作的意义不只是“炫技”,更意味着四足机器人可以进入高动态运动的新阶段。
产研强强联合,加速具身智能产业化落地
在这个过程中,MIT的控制体系起到了决定性作用。而执行器正是在这个系统中承接所有计算结果的“现实接口”。MIT的控制算法再复杂,如果执行器无法快速响应、高效输出,就无法把理论轨迹变成真实动作。
因此,Mini Cheetah并不是单一技术突破的结果,而是一个典型的协同创新案例:MIT在控制与系统架构上拓展边界,而CubeMars,则在物理层面上补齐了“把算法落地”的最后一公里。